こんにちは。たねやつです。
今回の記事では、Octopus ProとRaspberry Piへの配線を行います。前回よりもさらに細かい作業となりますが頑張りましょう!
前の記事
前回は電源インレットから24V電源、それぞれの機器への配線を行い電源を入れても問題がないことを確認しました。
Raspberry Piの電源をOctopus Proからとる
私の構成ではホストコンピューターとしてRaspberry Pi 4Bを使用し、電源を5VPSUからではなくOctopus Proからとるようにします。
ピンの確認
Octopus Proの5VピンとGNDピンをチェックします。Octopus Proのピンアウトが表示されているファイルが公式で配布されているのでそれを確認します。Raspberry PiとのUART通信用のピン(UART2,J26)が用意されているのでそれを流用します。実際のRaspberry PiとOctopus Proの通信はUSBで行い、電源だけピンを使用します。
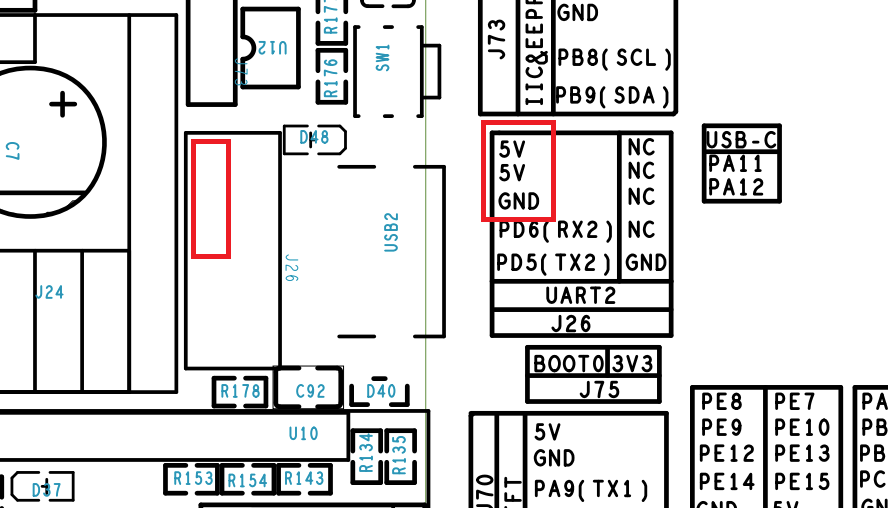
ピンレイアウトを見てみると右上のUSB端子のそばにJ26のピンがあります。その左上のピンが上から5Vピン2つとGNDピンとなっています。
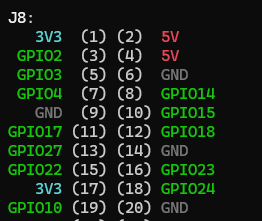
Raspberry Piはpinoutコマンドを使用すると簡単にピンレイアウトを確認することができます。右上のピン3つがOctopus Proと同じ順序で並んでいます。
配線の作成
それぞれのピンをつなぐための配線を作成します。今回はキット内にあって結局使用しないであろうデュポン形式のコネクタを使用します。これも本当はピンを圧着するための専用工具があるのですが揃えるのが面倒なので汎用の圧着工具を使用します。
ちょっと自分は配線の長さをギリギリにしすぎてしまったのですがもう少し余裕を持って作成したほうがいいと思います。
起動チェック
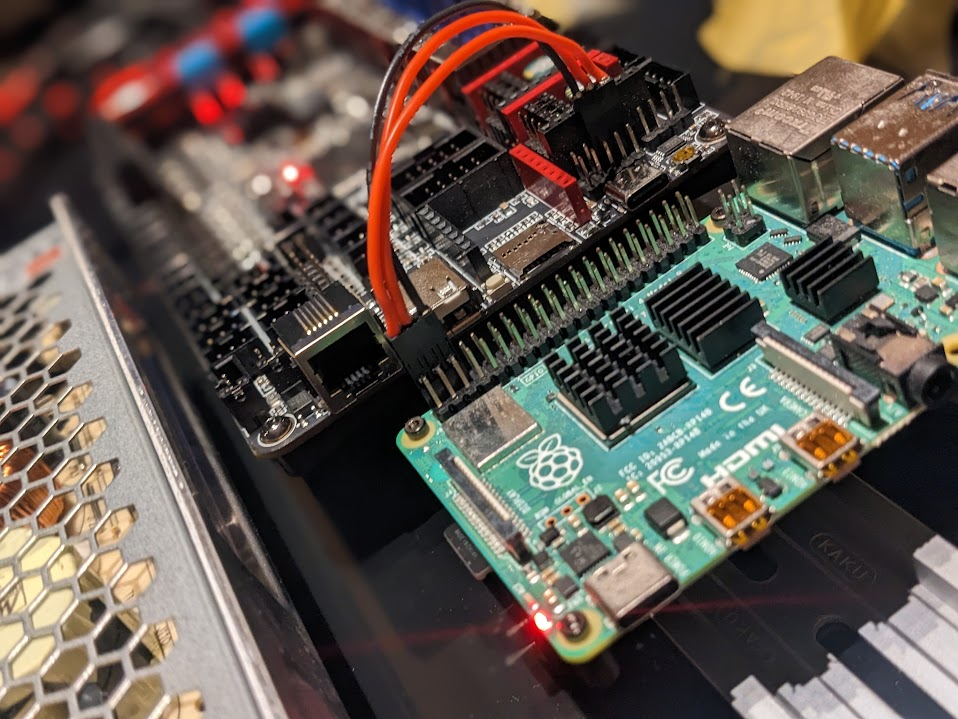
お互いのピンを繋いでVORON本体の電源を投入します。Raspberry Pi側のLEDが点灯すればOKです。現状はまだOSも準備していないので通電していることを確認して終了です。VORON本体の電源をOFFにします。
これで5V電源を別途用意しなくてもRaspberry Piを起動することができました!ただしRaspberry Pi 5を使用する場合はより電力を必要とするためこの方法は使えないかと思います。
ケーブルチェーンをつける
VORON本体側で一つ忘れていたのですが、XYガントリーから底面にモーターやエンドストップスイッチの配線を取り回しするためにケーブルチェーンを取り付ける必要があります。
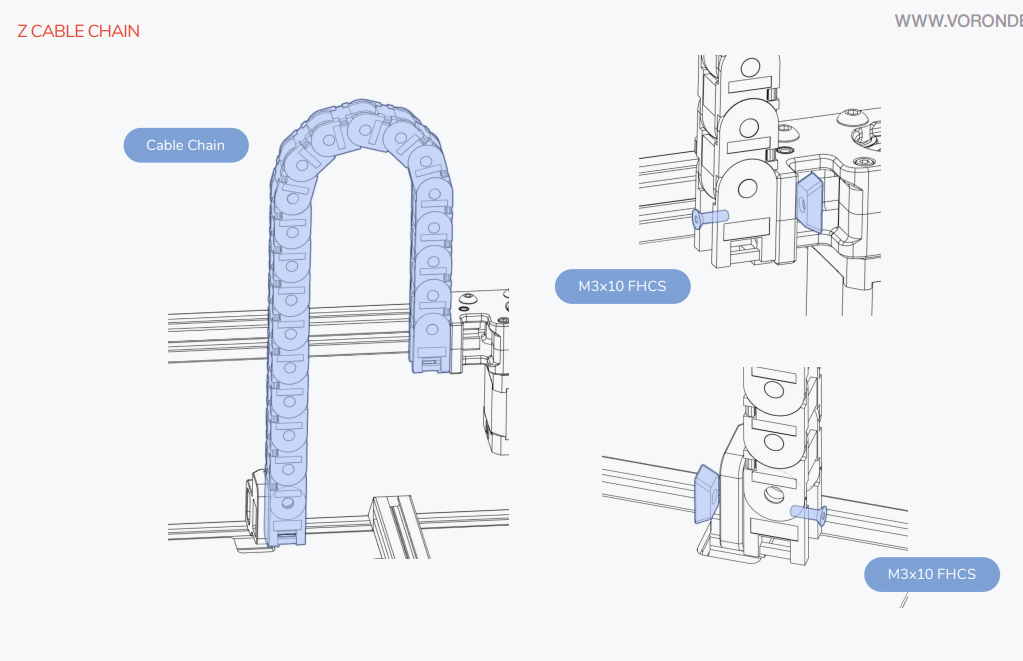
これを取り付けることによってガントリーの上下を行った際も配線がバラバラしなくなります。取り付けが完了したらABモーターの配線、Yエンドストップの配線をチェーン内を通して底面に送り出します。このときにどっちの線がAモーターBモーターなのかコネクタ付近にラベリングしておくと後でOctopus Proに装着するときにわかりやすいです。
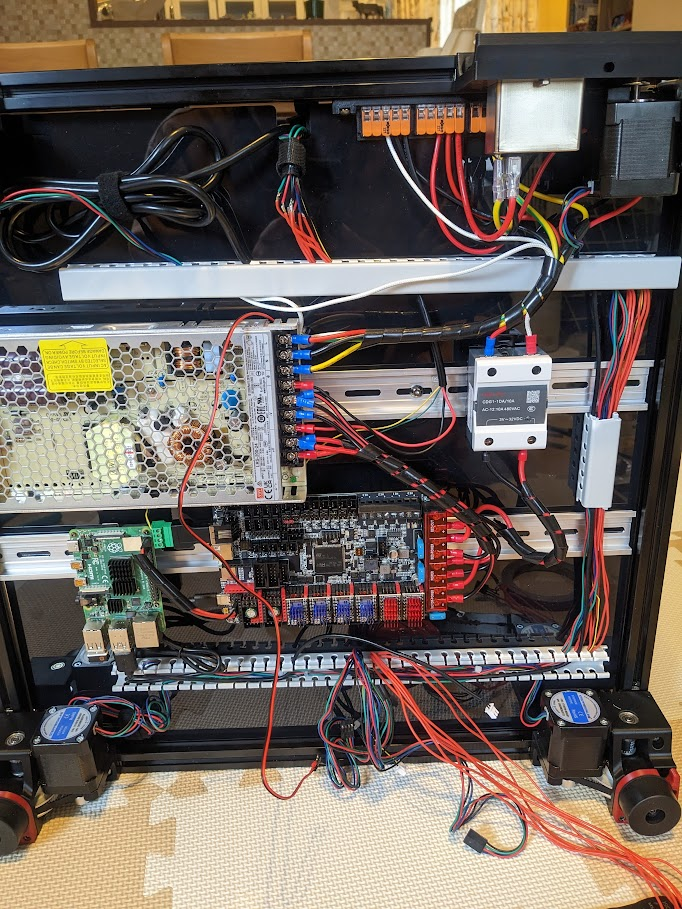
Octopus Proへ各部品の配線を行う
おおよそ配線できるようになったのでOctopus Proにそれぞれのパーツのコネクタを挿していきます。
配線ガイドを有効活用する
配線をボードに挿す前に、配線ガイドを各所に設置していきます。これを使用することで配線完成後に線がバラバラしスッキリします。私はとりあえずコの字型に配置して使用しました。ニッパーや大きめのハサミで簡単に切れますが鋭利なので注意してください。
Zモーター
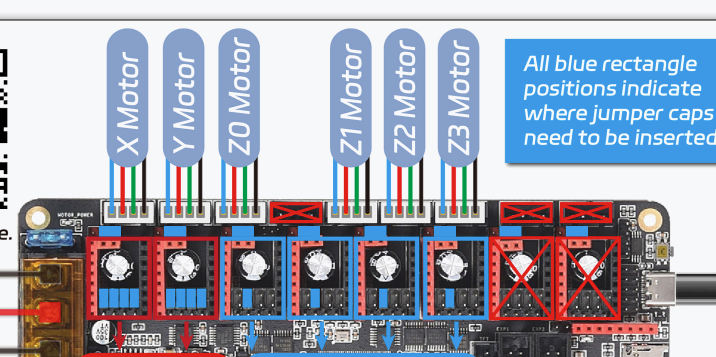
Zモーターの配線を挿していきます。4本ありそれぞれ間違えてはいけないのでよく確認しながらセットしてください。VORONを正しい向きで床に設置したときに左手前から時計回りに0−3番となっています。もし配線を間違ってしまっていても初期セットアップ時に一つずつ確認する(各モーターを数ミリずつ動かす作業があります)ので直ちに破損ということにはなりません。
配線の長さが足りない場合は適当な箇所で配線を切って線をはんだ付けするなり、コネクタでつなげるなりして延長してください。私ははんだ付けで延長しました。
ABモーター
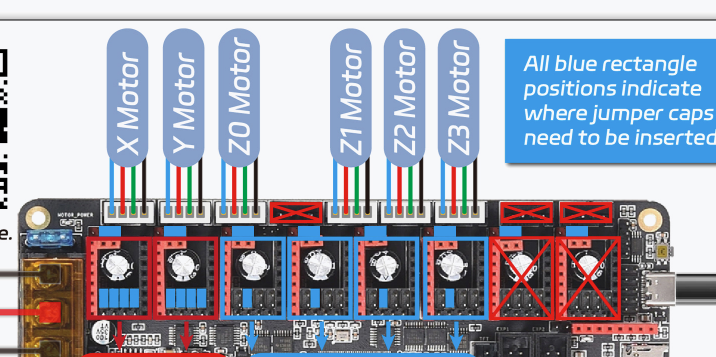
ABモーターもZモーターと同様に配線していきます。こちらも動かす前にテストするので左右逆であってもベルトがちぎれる等発生する前に気づくことはできます。
正面から見て左側にあるのがBモーター(Xモーター)で、右側がAモーター(Yモーター)となります。
ファン
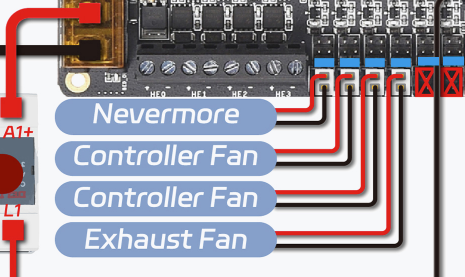
NEVERMOREのファンのコネクタを接続します。あとあと外装が完成してからコントローラー用のファン2機とエキゾースト(庫内の換気用)ファンも取り付けますが、私はつけていません。組立したのは秋ごろだったので特に必要なかったのですが夏になるにかけて動かそうかなと思います。。結構ファンの音うるさいんですよね。。。
ヒートベッド

ヒートベッドの温度計の配線を接続します。キット品の場合は最初からコネクタがついてるはず。
Yエンドストップ
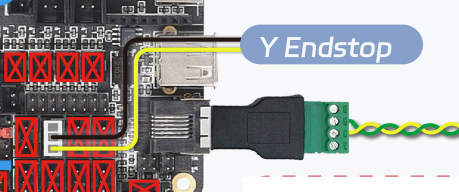
Yエンドストップの配線を接続します。細い線ですがガントリー部分から結構長距離引っ張ってくるので断線したりしないように気を付けます。
Raspberry Pi
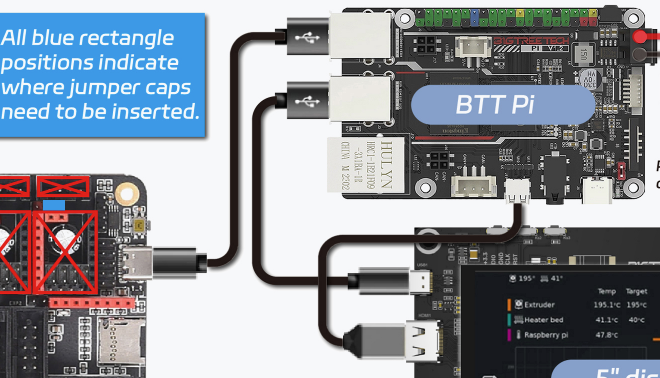
(画像上ではBTT Piになってます)
Raspberry PiとOctopus ProをUSBケーブルで接続します。USBケーブルの長さを詰めるのは大変なので適当なタイラップなどでくくりあげておきます。
SB2209用ケーブルをつける

最後にStealthBurner内にあるSB2209とOctopus Proをつなぐための配線を行います。別に難しいわけではないですが順番を間違えたりあとから作業するのが難しかったりするので追って進めていきます。
片方が特殊形状のコネクタになっていて、もう片方が2本の太い線と2ほんの細い線になっているケーブル(umbilical cable)を用意します。
スリーブを通す
私は使用していませんが、StealthBurnerからガントリーまでのケーブルが露出している部分に伸縮性のあるスリーブをつけることができます。すでにコネクターのある部分ではない方から通さないといけないため、装着するのであれば現段階で装着します。なくても問題はありません。
私はフィラメントガイドのPTFEチューブとスパイラルケーブルで友巻き状態にしているので使用していません。こちらの方が個人的にはケーブルが1つにまとまるので見栄えはいいかと思います。

ガイドを通って裏面に配線を通す

StealthBurnerからガントリーまでの長さは、ツールヘッドを左手前(ケーブルを通そうとしている箇所から最も遠い地点)に移動してもつっぱらない程度にします。ケーブルにガントリー部分に固定するためのソケットのようなものを装着して締め込んでいくと固定されます。
通した配線はABモーターの配線と同じようにケーブルチェーンを通して裏面に持っていきます。モーターの配線と違ってちょっと太くて取り回しが難しいので他の配線を傷付けないように注意します。
接続する
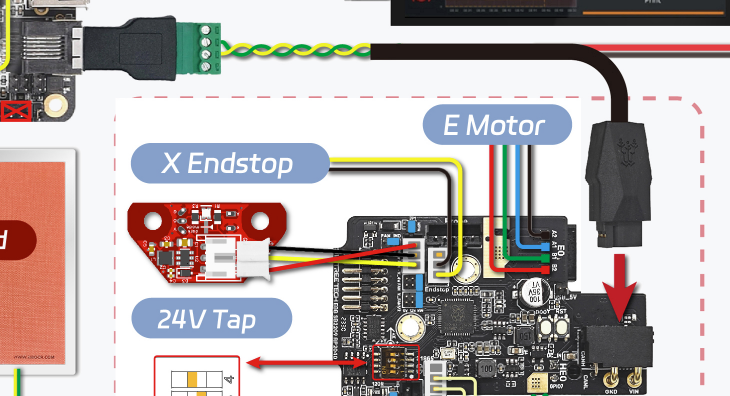
あとは配線をするだけですが、電源と通信用の線をそれぞれ接続できるように加工する必要があります。電源用の方には24V電源に装着できるようにコネクターをつけ、緑と黄色の線は先端の被膜を剥いて、LANケーブルのコネクターのような端子に装着します。準備ができたらそれぞれ接続します。LANケーブルの端子のような方は引っかかりがなく結構抜けやすいので注意が必要です。
ガントリーまでのたるみを解消する必要がある
最後にStealthBurnerからガントリーまでのたるみを解消する必要があります。例えばツールヘッドを一番左奥に移動したときにケーブルがたるんでビルドプレートの方に接触する、またはケーブルが邪魔でXY軸の移動を阻害する可能性があります。
あとからフィラメント用のPTFEチューブと友巻きする場合は現段階では特にすることはないですが、そうではない場合は弾性のある硬い線を使用してケーブルを宙に浮かせる必要があります。SIBOORのキットに含まれていますが、発泡スチロールと段ボールの隙間に入っていて完成するまで気づきませんでした。。。(笑)
とりあえずこれで配線に関しては一旦完了です。
次の記事
次はRaspberry Piで使用するOSを作成します。いよいよソフトウェアの領域に入っていきます👀